An Astronaut Controls a Robotic Dog From Orbit
Swedish astronaut Marcus Wandt took control of a series of robots in Germany while on board the International Space Station, zipping around the Earth at 28,000 kilometers per hour (17,500 mph.) Researchers want to understand how time delays can affect the remote control of robots from an orbiting platform. Future astronauts could control rovers on the Moon’s or Mars’s surface from a spacecraft in orbit. Until now, only wheeled rovers have been part of the tests, but now they have added a dog-like robot called Bert.
This robot research session, called ‘Surface Avatar’ follows initial experiments carried out in July 2023. Wandt operated the robots from a control station in the space station’s Columbus module, commanding three different robots at the German Space Agency’s (DLR) Robotics and Mechatronics Center in Oberpfaffenhofen, Germany. The goal is to develop innovative technologies that will allow humans to control several robots with precision, and have them act semi- or fully autonomously and even have different robots perform a task together.

“Future stations on the Moon and Mars, including astronaut habitats, will be built and maintained by robots operating under the guidance of astronauts,” said Alin Albu-Schäffer, Director of the DLR Institute of Robotics and Mechatronics, in a DLR article. “Our latest control and AI algorithms enable a single astronaut to command an entire team of different robots. Our DLR-ESA team is a world leader when it comes to this technology.”
The remote operation of the dog-like robot Bert was marked the first time a non-wheel-driven robot was controlled remotely from space by astronauts. Previously, DLR’s humanoid service robot Rollin’ Justin and ESA’s Interact Rover have been teleoperated from space.
During the session, Wandt, who is part of the private Axiom Mission 3 (Ax-3), was able to command Bert to utilize several types of gaits and, because of his leg-based locomotion, Bert was able to explore rough terrain, including small caves — areas that the rolling robots cannot reach. At one point, Wandt allowed Bert to explore the lab’s surroundings independently and monitor the terrain with his camera eyes. Meanwhile, Wandt operated Rollin’ Justin and the Interact Rover.

The time delay between the ISS and Earth is usually less than one second.
“That’s because my radio call comes from ISS first to White Sands in the USA,” explained German Space Agency astronaut Matthias Maurer, in a video from DLR. “From there it goes to Houston at NASA. From there it will be forwarded to Munich where our control center is in Oberpfaffenhofen.”
Maurer added that the delay experienced is like what sometimes happens on a Skype call, which occasionally has delays in communications. And of course, the round-trip delay time might be close to 2 seconds, which is deficiently noticeable, especially during conversations.
DLR said that future operations of robots and humans working together must be well planned out in order for them to work as a team. When building a habitat, for example, combining the different skills of several robots is very helpful.
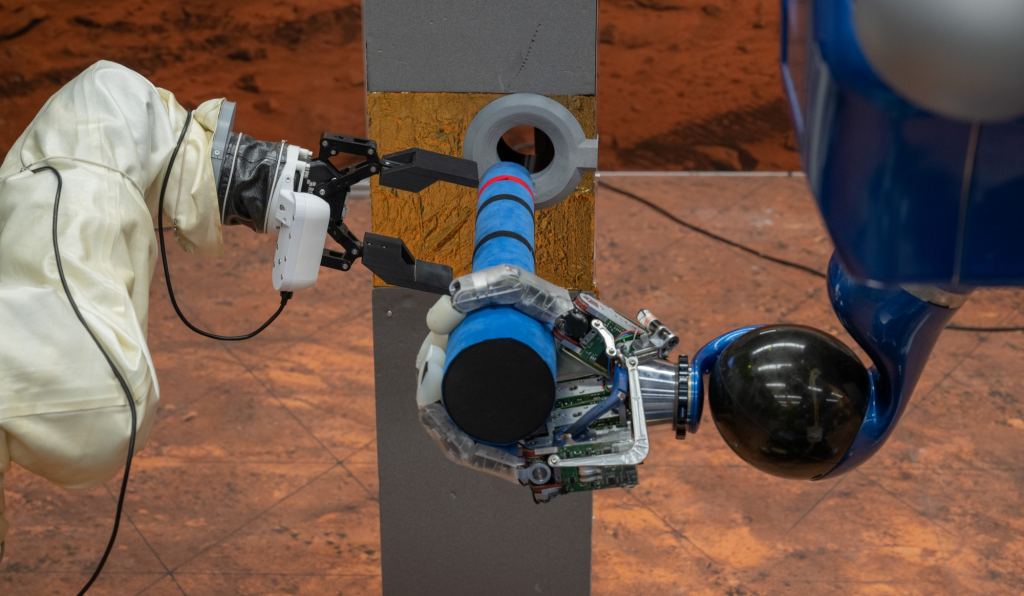
Wandt also tested out this concept and for the first time two robots worked together to accomplish a task: Rollin’ Justin and the Interact Rover jointly installed a short pipe representing a scientific measuring device. Under the command of Wandt, Rollin’ Justin used his dexterous hands to safely grasp the pipe and carefully guide it to the measuring point. Wandt then used the Interact rover’s remote control to install the pipe held in position by Justin.
Robots have also been used in space on board the ISS. Robonaut is a joint DARPA–NASA project that created a humanoid torso robot to test out robotics in space. Additionally, three free-flying robots on the space station, known as Astrobees, support multiple demonstrations of technology for various types of robotic assistance on space exploration missions and on Earth.
The post An Astronaut Controls a Robotic Dog From Orbit appeared first on Universe Today.
Universe Today
Go to Source